
Diving Robots: Bathymetry from Below
Autonomous diving robots are the future of bathymetry. Not only do these vehicles augment human crews by operating independently in remote locations, they yield better maps by cutting through surface noise and getting closer to targeted topography. Surface motion complicates multibeam sonar survey and although manufacturers and surveyors do their best to compensate for motion, results are more easily rendered and much improved without it. In addition to increased motion, the surface layer is often highly stratified and more dynamic, causing sonar blur and yielding noisier images. By diving deeper into the water column this can be avoided, and a clearer capture achieved. Motion and blur aside, bathymetry is always better when you’re closer to the seabed. Let’s take a look at tangible examples, captured by our TRITON (for NOAA OMAO), of multibeam sonar survey from the surface and at depth.
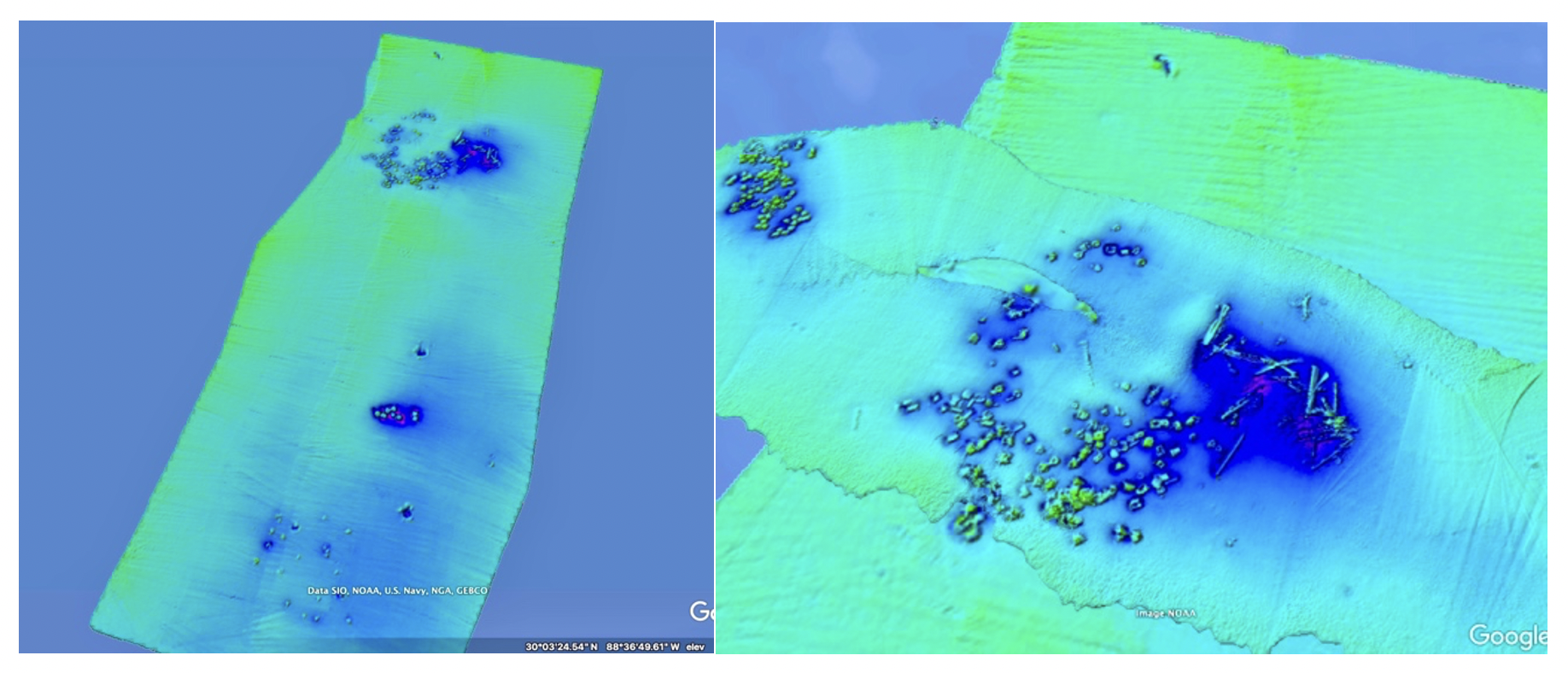
Comparison of data of the same subject. Left side: fish haven surveyed from the surface (20m distance from subject). Right side: fish haven surveyed at 10m depth (10m distance from subject).

Comparison of inset data of the same subject. Left side: fish haven surveyed from the surface (20m distance from subject). Right side: fish haven surveyed at 10m depth (10m distance from subject).
The sets of images shown depict the same fish haven—it sits 20m below the surface and is dotted with objects placed on the seabed to attract fish. These images were mapped first from the surface, and again and at a depth of 10m. The difference in data output is drastic. When you survey at depth, you skip the motion, you skip the complex oceanography, and you get closer to your subject—all of which adds up to a more successful survey and a higher resolution, more meaningful map.